For the past two years, autonomous vehicle software provider Oxbotica has been looking farther afield, employing world-class video game developers, to drive development of autonomous software for the vehicles of the future.
Game developers who previously launched flight simulators, racing games and sports titles on both consoles and smartphones have helped create the simulated world in which Oxbotica is testing its autonomous software – whether driving on an urban street or off-road in a mining quarry.
The company has first attracted to its fold in March 2018 Todd Gibbs, who previously headed game development at NaturalMotion, the company behind the smash hit CSR Racing on IoS and Android.
“There is a lot of commonality between developing a chart-topping game and autonomous software, the most valuable being robust coding principles and a focus on CPU efficiency. We are able to write new code, debug and test in real-time without sacrificing robustness or safety,” he said.
The idea to look for other domain talents to help in autonomous vehicle software development came from a meeting between Gibs and Oxbotica, where they quickly realised how amazingly game development skills would fit with AV development.
“The ability to build scenarios to test cars in a difficult environment is key and the fact that you can do unlimited testing to validate software. The similarity in coding between games and AVs is efficiency and robustness of code,” an Oxbotica spokesperson told FutureIoT.
Today, the company counts a dozen former game developers among its ranks.
“We have attracted some of the brightest talent from the video game industry because they bring a speed of development and deployment unique to that industry,” said Gibbs

The techniques behind animation technology used in the development of big blockbuster movies are also being harnessed by Oxbotica, while a video game engine, not dissimilar to those behind Fortnite and Call of Duty, is helping run the company’s virtual test programme.
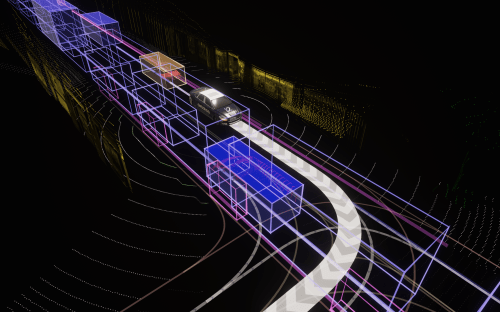
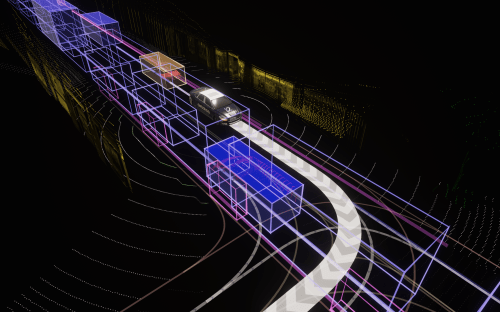
Simulation is one of the key enablers for Oxbotica’s autonomous software stack and its goal of Universal Autonomy, allowing engineers to run virtual testing in an infinite number of scenarios; varying environmental conditions, traffic congestion, and modelling unpredictable pedestrian behaviour or scenarios which can’t easily be recreated in the real world.
Software changes can then be played back through these simulations in a fraction of the time required for live testing, allowing development to happen quickly, safely and at scale. Simulated scenarios can be run all day, every day, to ensure Oxbotica software is thoroughly tested before being deployed to the fleet – whether that’s on-road, off-road, down a mine or around an airport.
Oxbotica’s modular software stack twins simulation testing with live on-road trials, conducted in London and Oxford, to build a full autonomy ecosystem that can be deployed at scale, anytime, and in any place.
source: futureiot